
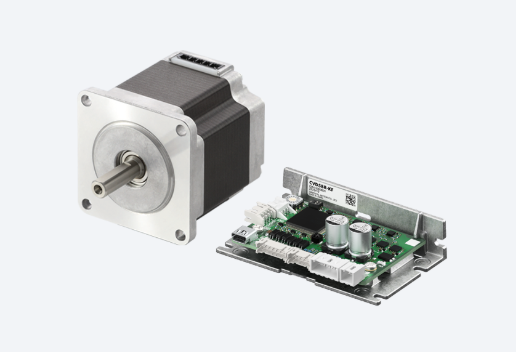
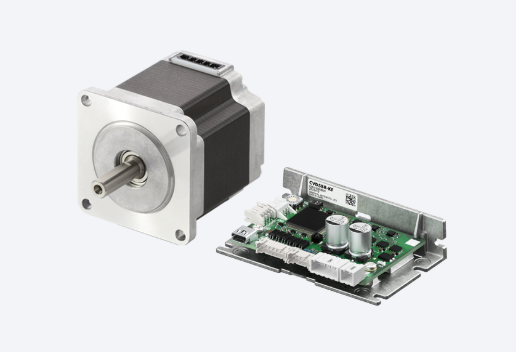
サーボモーター AZXシリーズ
- 参考価格
- お問い合わせください
製品・サービスに関する資料
 PDFダウンロード
PDFダウンロード
得意な分野・カテゴリー
ユーティリティ設備
物流ライン
冷凍食品
担当者からのおすすめポイント!
AZシリーズと基本的な操作方法が同じ
AZXシリーズは、AZシリーズと基本的な操作方法が同じです。
同じ装置内で、AZXシリーズとAZシリーズを併用する際に、操作性の変更による手間なく使用できます。
機能安全」の認証取得について
TUVマーク
「機能安全※」の認証を取得したことにより、安全システムへの対応が容易になりました。周辺機器を削減し、配線の簡易化や、省スペース化を実現します。
お問い合わせください。
製品説明・スペック紹介
バッテリレスのアブソリュートセンサを搭載したサーボモーター
AZXシリーズは、AZシリーズと同じバッテリレスの機械式アブソリュートセンサ(ABZOセンサ)を搭載しています。
位置決め運転や連続運転に特化したサーボモーターです。
ABZO+AZX
機械式センサ
非通電時も位置情報を保持
多回転アブソリュートセンサ
基準となる原点から、モーター軸で±900回転(1800回転分)の絶対位置が検出可能
外部センサ不要
アブソリュートシステムなので、原点センサ、リミットセンサは不要です。
メリット
高速原点復帰+原点復帰精度の向上
コストダウン
省配線
外部センサ誤動作の影響を受けない
バッテリレス
機械式センサはバッテリが不要です。
位置情報はABZOセンサで機械的に管理されています。
メリット
バッテリの交換が不要
自由なドライバの設置
海外輸送も安心
ネットワーク対応ドライバ
ドライバはEtherCAT、EtherNet/IP、PROFINETに対応しています。
上位制御機器とドライバを通信ケーブル1本で接続できるため、省配線を実現します。
※ EtherCAT対応ドライバは対象外です。
chart
位置決め運転データ設定値(最大256点)
汎用入出力点数(入力6点、出力6点)
通信用入出力点数(入力16点、出力16点)
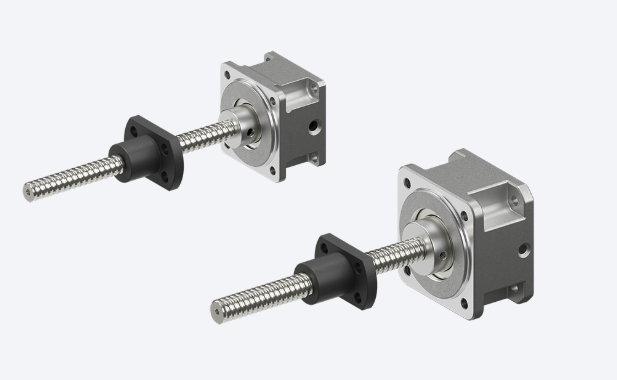
高速域で高トルクを発揮
AZXシリーズは、高速域で高トルクを発揮します。
移動量が多い位置決め用途(例:ボールねじの駆動)に適しています。
取り扱い企業
- 企業名
- オリエンタルモーター株式会社同企業の情報・その他製品を見る
- 所在地
- 〒110-8536 東京都台東区東上野4丁目8番1号
- 電話
- 03-6744-0431
- Webサイト
- サービス提供エリア
-
- 関東
- 東京都
製品詳細確認・カタログ無料ダウンロード可能







関連キーワード:
モーター モータ サイクル サーボ モーター サーボ モーター 制御 サーボ 制御 サーボ モータ ロボット サーボ モータ 種類 ロボット サーボ モータ

